INnovative multi-sensor network for DEformation and Seismic Monitoring of Urban Subsidence-prone Areas
 Following the previous publication concerning the main goal of the research project INnovative multi-sensor network for DEformation and Seismic Monitoring of Urban Subsidence-prone Areas – INDES MUSA, a newly implementation is performed associated with a change detection process.
Following the previous publication concerning the main goal of the research project INnovative multi-sensor network for DEformation and Seismic Monitoring of Urban Subsidence-prone Areas – INDES MUSA, a newly implementation is performed associated with a change detection process.
The technological development in the fields of computer vision and digital photogrammetry provides new tools and automated solutions for applications in urban studies associated with urban development, 3D modelling and change detection. In this context, numerous algorithms have been developed over the years for the automatic change detection in urban environments using high resolution digital aerial imagery as well as point clouds derived from LiDAR sensors and dense image matching techniques.
fig 1. Image based change detection results at a sub-region of the overall scene of the Kalochori urban site
The wider scope of the automatic change detection is a research topic in over two decades. In the literature, two types of approaches called chance enhancement and from-to are proposed for the automatic change detection. The chance enhancement approach indicates only the position and the magnitude of the changes. In contrary, the from-to approach indicates not only the position and the magnitude of the changes but also its nature (e.g. building changes, vegetation changes, etc.). However, the scientific methodologies vary with the desired objects of interest (e.g. automatic building change detection) towards the challenge of the increasingly greater demands for accurate and cost effective applications.
The main goal of this research is to highlight the building and vegetation changes of the urban area of Kalochori. In this context, a spatial and multi-temporal analysis is quite capable.
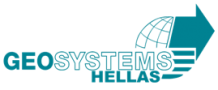
For the epoch 1, an orthoimage (produced by high resolution RGB digital aerial imagery that derived at 11 May 2014) with a ground sample distance (GSD) of 10 cm as well as a LiDAR point cloud with a density of 4pts/m2 (derived at 2 May 2014) are used. On the other hand, for the epoch 2, an orthoimage (produced by high resolution RGB digital aerial imagery that derived at 18 November 2015) with a GSD of 10 cm as well as a point cloud produced by dense image matching techniques with a point density of 1 m are used. Sophisticated image based as well as point cloud based chance enhancement techniques were implemented to achieve accurate and reliable results.
fig2. The point cloud based change detection results
Contact info
Contact person: Betty Charalampopoulou
E-mail : mail@geosystems-hellas.gr
Participants in the project: GEOSYSTEMS HELLAS S.A. (coordinator) and the research institutes: EPPO-ITSAK, NOAIG.
This page has no comments.